In den letzten Jahren, mit einer alternden Gesellschaft, der zunehmenden Häufigkeit von knochenbedingten Krankheiten, der traditionellen Art und Weise der orthopädischen Chirurgie, der Position von gefährdeten Patienten, der Genauigkeit der Kontrolle der chirurgischen Instrumente, der persönlichen Erfahrung des Arztes und dem Grad der Ermüdung, beeinflusst der Einfluss solcher Faktoren die chirurgische Erfolgsrate und Zuverlässigkeit und im Gegensatz zur herkömmlichen Chirurgie kann der Knochenchirurgieroboter automatisch oder unter dem Befehl der passiven Ausführung eine mechanische Armpositionierung anstelle der unbewaffneten Positionierung des Arztes durchführen, Stabilität und Genauigkeit werden verbessert.
Navigationsgeräte für chirurgische Roboter in der klinischen Anwendung sind immer weiter verbreitet, und 3-D-Bilder sind die Grundlage für die Implementierung von chirurgischen Roboter-Navigationssystemen und können intraoperative Bilddaten der 3-D-Rekonstruktion realisieren, Operationsfehler verringern und die Anforderungen der Operation erfüllen. hat die doppelte Rolle der Kartenposition und des Effekttests, macht die Operation genauer, der Operationseffekt ist sicherer.
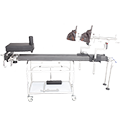
Stehen sowohl OP-Roboter als auch 3D-C-Bogen zur Verfügung, kann die Operation dennoch nicht normal durchgeführt werden. Ein Operationstisch muss ebenfalls ausgestattet sein und der Operationstisch muss sowohl den Anforderungen des Operationsroboters als auch des 3D-C-Bogens entsprechen. Nicht alle OP-Tische können mit OP-Robotern und 3D-C-Bögen ausgestattet werden, daher wird für optimale fluoroskopische Ergebnisse ein Karbonfasertisch von Howell Medical benötigt.
Schauen Sie sich das folgende Bild an. Der Doppelsäulen-Operationstisch , der ultralange Perspektivenraum und das Zubehör für die Wirbelsäulenchirurgie können zur Durchführung der Wirbelsäulenchirurgie verwendet werden. Die Traktion der unteren Gliedmaßen und anderes Zubehör können je nach Bedarf ebenfalls verwendet werden, um weitere chirurgische Anforderungen zu erfüllen.